/ Цель проекта
Довольно частая ситуация в практике инженера, работающего в области компьютерного моделирования, когда есть необходимость провести расчет какого-либо механизма и хотелось бы, что решение такой задачи будет достаточно точным и одновременно максимально быстрым.
Для решения таких задач компания Ansys предлагает несколько модулей, эффективность которых мы рассмотрим в данной статье:
Ansys Rigid Body Dynamics (RBD)
Данный модуль определяет динамическую реакцию сборки преимущественно твердых тел, соединенных шарнирами, пружинами и имеющих возможность контактировать друг с другом.
Для учета жесткости деталей используется технология суперэлемента. То есть объект, разбитый на множество конечных элементов, преобразуется в один элемент с мастер-узлами в местах граничных условий и соединений.
Этот тип анализа настраивается в приложении Ansys Mechanical, которое использует решатель Ansys Rigid Dynamics, основанный на законе сохранения энергии, для вычислений.
Ansys Transient Structural
Анализ переходных процессов по определению включает нагрузки, являющиеся функцией времени. Mechanical может выполнить анализ переходных процессов как для деформируемой конструкции, так и для абсолютно жестких тел. При этом используется решатель Mechanical APDL
Этот тип анализа используется для определения динамической реакции конструкции на действие любых общих зависящих от времени нагрузок. Используется для определения изменяющихся во времени перемещений, деформаций, напряжений и сил в конструкции, когда она реагирует на любые переходные нагрузки. Временной масштаб нагрузки таков, что инерция или эффекты демпфирования считаются важными.
Ansys Motion
Ansys Motion — это мощный интерфейс, предназначенный для анализа динамики многотельных систем. Ansys Motion полностью независим от других решателей Ansys. Он использует неявный метод интегрирования, который дает стабильные и точные решения. Модели могут включать в себя пружины, демпферы и втулки, а также контакты между компонентами.
В анализе Ansys Motion сборки могут содержать как жесткие, так и деформируемые компоненты.
Ansys LS-DYNA
Это программа для расчетов методом конечных элементов общего назначения, способная моделировать сложные задачи реального мира. Истоки кода лежат в очень нелинейном, нестационарном динамическом анализе с использованием явного интегрирования по времени.
Потенциальные области применения LS-DYNA многочисленны и могут быть адаптированы для многих областей. Любая из многих функций LS-DYNA может быть объединена для моделирования широкого диапазона физических явлений. LS-DYNA — один из самых гибких доступных программных пакетов для конечно-элементного анализа.
/ Реализация проекта
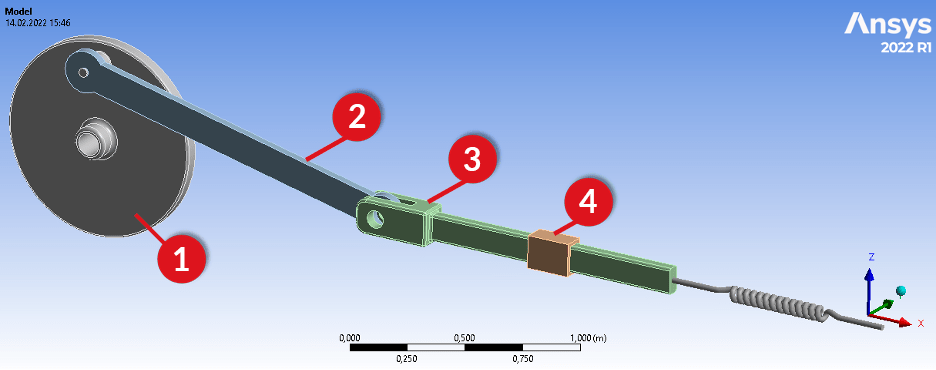
Рис. 1. Рассматриваемый механизм (1–ведущее колесо, 2–шатун, 3–шток, 4–направляющая)
Решение задачи «Кривошипно-шатунного механизма»
Для сравнения эффективности инструментов неявного интегрирования были рассмотрены инструменты: Ansys RBD, Transient Structural и Ansys Motion. Рассматриваемый механизм представлен на Рис. 1.
В ходе реализации проекта было рассмотрено 3 постановки задачи:
1. Тела абсолютно жесткие и соединены между собой только шарнирами (Рис. 2);
2. Тела абсолютно жесткие, но один из шарниров заменён контактом без трения (Рис. 3);
3. Шток деформируемый, все тела соединены шарнирами (Рис. 4).
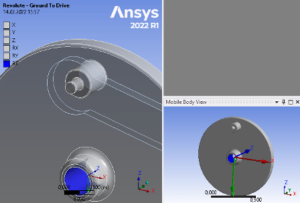
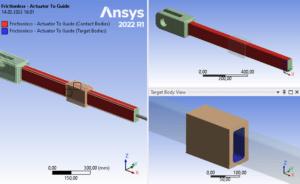
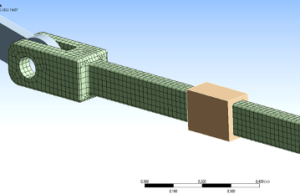
Рис. 2. Пример шарнирного соединения Рис. 3. Контакт, заменяющий шарнир Рис. 4. Сетка конечных элементов на штоке
Нагрузка принимается на вращательный шарнир между ведущим колесом и «землей» в виде линейной функции, представленной на Рис. 5.
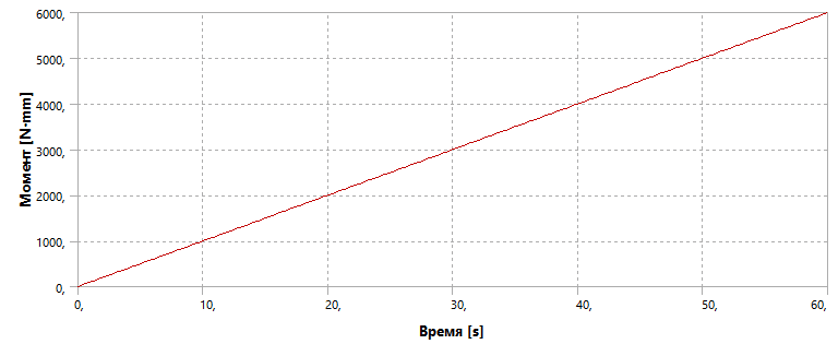
Рис. 5. Изменение крутящего момента на ведущем колесе
Выходными результатами для сравнения решений принимаются: скорость штока, сила реакции в шарнире по оси Х между шатуном и штоком и максимально напряжение на штоке во временном диапазоне работы моделирования механизма. Таким образом убедимся, что все решатели, как и ожидается, покажут приблизительно одинаковые значения. Результаты сравнения представлены на рис. 6 — 8.
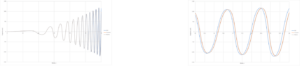
Рис. 6. Скорости штока, полученные в разных модулях
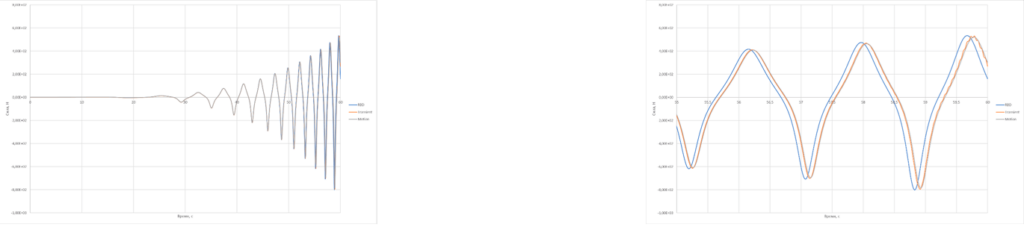
Рис. 7. Сила реакции в шарнире между шатуном и штоком по оси Х
Расхождения кривых обусловлено наличием численного демпфирования. Для модуля Motion во всех случая была задана величина 0,15. В Transient было задано 0,1 в первых двух задачах (рисунки 6 и 7) в третьей задаче (рисунок 8) величина численного демпфирования составила 0,075. В целом можно принять, что задачи решены одинаково точно, при задании соответствующих коэффициентов численного демпфирования.
Рис. 8. Максимальное эквивалентное напряжение на штоке
Расхождения кривых обусловлено наличием численного демпфирования. Для модуля Motion во всех случая была задана величина 0,15. В Transient было задано 0,1 в первых двух задачах (Рис. 6 и 7) в третьей задаче (Рис. 8) величина численного демпфирования составила 0,075. В целом можно принять, что задачи решены одинаково точно, при задании соответствующих коэффициентов численного демпфирования.
Решение задачи «Задача соударения двух сфер»
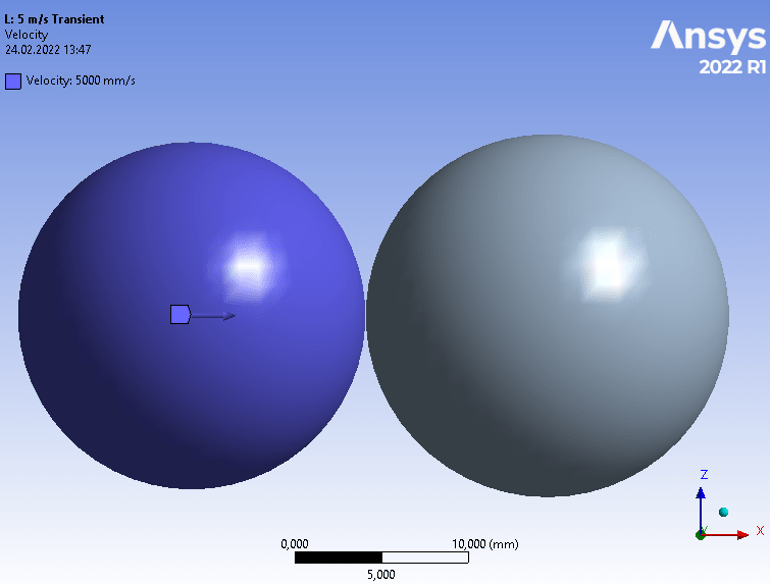
Рис. 9. Задача соударения сфер
Для сравнения возможностей инструментов нелинейного решения сравниваются инструменты неявной динамки Transient Structural и Ansys Motion с явной в LS-DYNA.
Решается задача соударения сфер в 3-х постановках:
1. Скорость перед ударом одной из сфер 5 м/с, вторая сфера неподвижна, материалы упругие (Рис. 9);
2. Скорость перед ударом обеих сфер 25 м/с, учитывается пластическая деформация;
3. Скорость обеих сфер перед ударом 250 м/с, учитывается пластическая деформация.
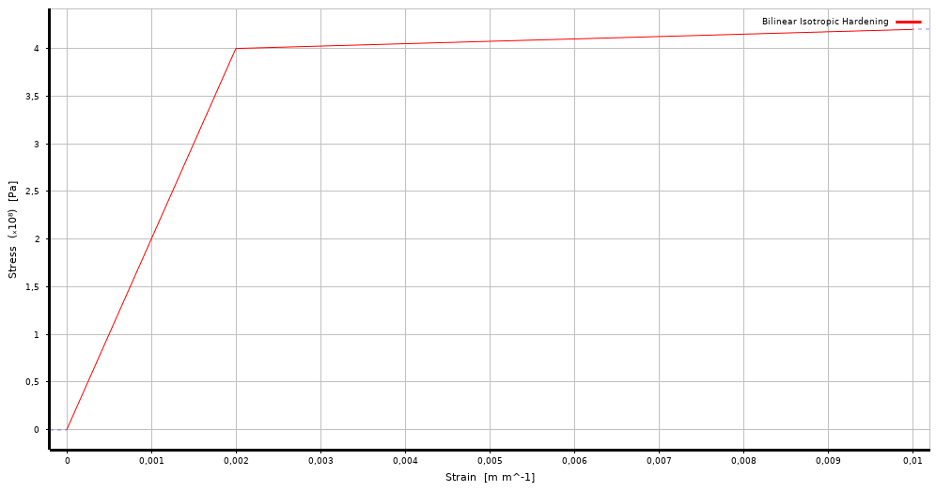
Рис. 10. Кривая пластичности
Пластическая деформация описывается билинейной кривой изотропного закона упрочнения (Рис. 10). Таким образом, изменение пластического поведения от скорости деформации не учитывается.
Между сферами моделируется контакт без трения на основе штрафных функций.
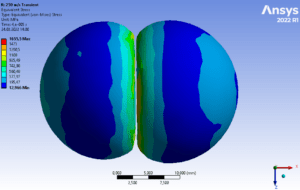
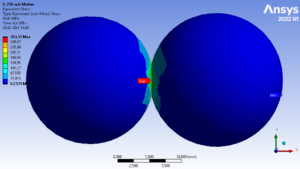
Рис. 11. Результат моделирования соударения в Transient Structural и LS-DYNA со скоростью 250 м/с Рис. 12. Результат моделирования соударения в Ansys Motion со скоростью 250 м/с
В результате решения тестовых задач было определено, что модуль Ansys Motion не может решать задачи с пластическими деформациями (Рис. 11- 12). В то время как Transient Structural и LS-DYNA без проблем справились с такой задачей.
/ Результаты проекта
Результаты сравнения модулей при решении задач «Кривошипно-шатунного механизма» и «Задача соударения двух сфер» приведены в таблице 1.
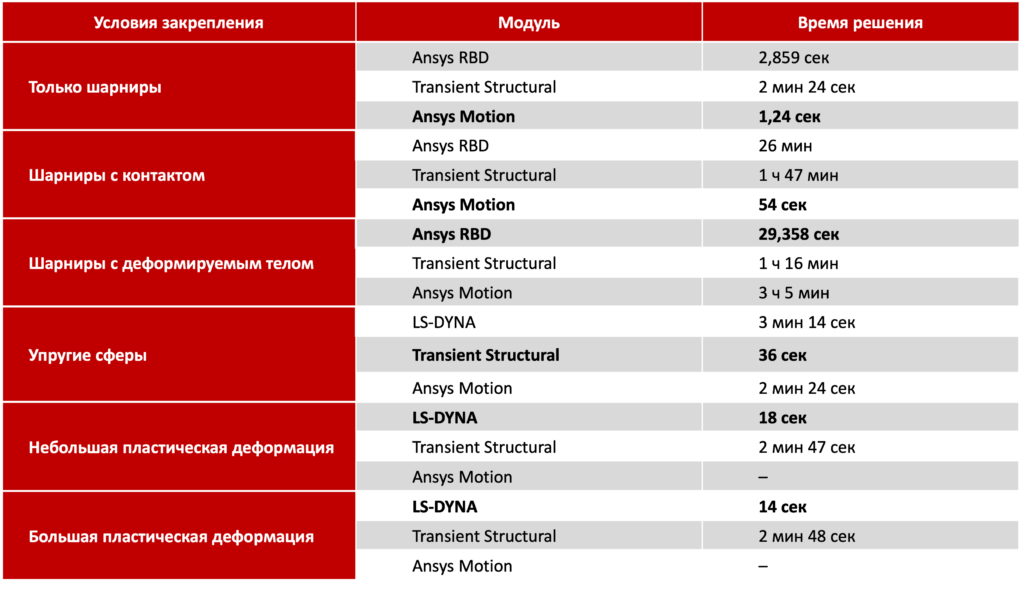
Табл.1. Результаты сравнения сведены в таблицу
Исходя из таблицы 1 можно сделать следующие выводы:
- Наилучшим решателем для задач динамики с абсолютно твердыми телами и контактным взаимодействием будет Ansys Motion;
- Наиболее универсальным инструментом оказался Transient Structural;
- Ansys RBD хорошо справляется с задачами без контактного взаимодействия и с деформируемыми телами за счет технологии суперэлемента.
- Задачи с большими перемещениями и пластическими деформациями лучше всего, ожидаемо, были решены в LS-DYNA.